Projects

Should I be worried?
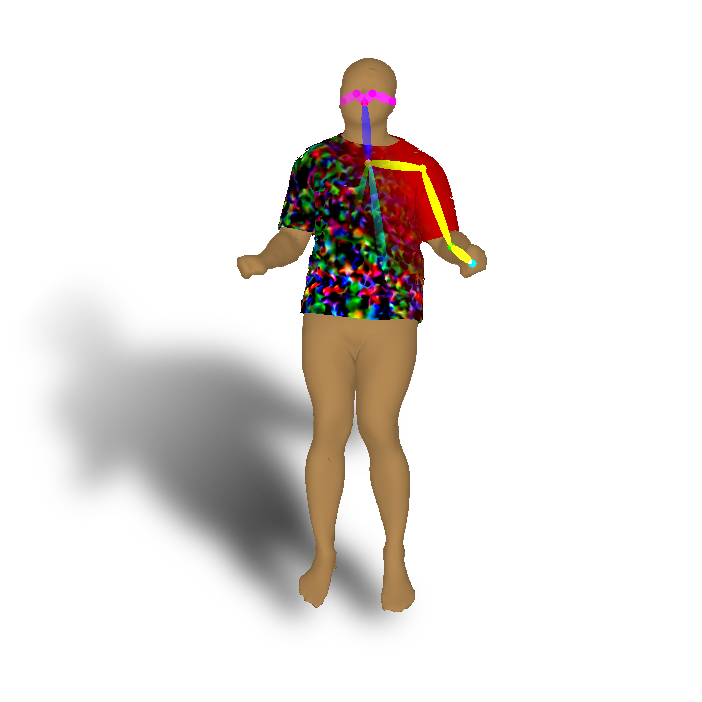
Based on a collection of Google Location History data sets, we compute a 3D spatiotemporal infection risk map that reflects the risk of being infected when residing at or passing through places on that map. The map can be integrated over a trajectory to yield a risk score. This can be used to recommend users to stay at home or even get tested for SARS-CoV-2.
Hitchhiker's guide to the galaxy door
Inspired by the movie hitchhiker's guide to the galaxy I created a small system, which replicates the behaviour of the doors in the spaceship.
View Project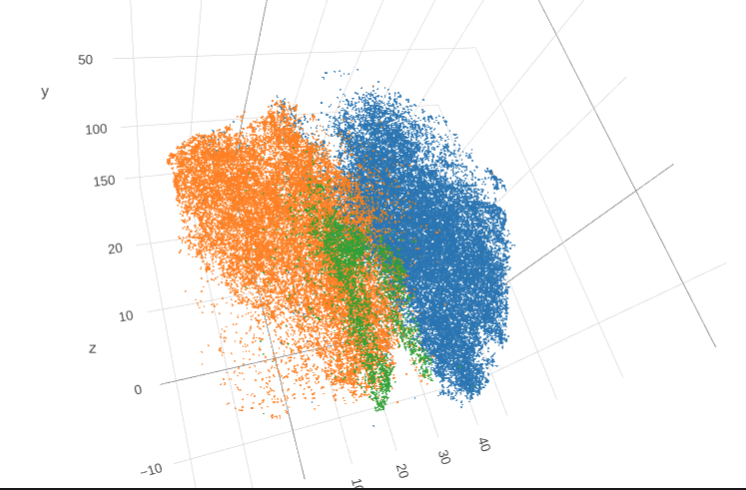
Advanced machine learning
This project consists of 5 subprojects in the medical subfield of machine learning. Various tasks like multi class classification and regression were performed. This task were takled using LSTMs, decision trees or suport vector machines.
View Project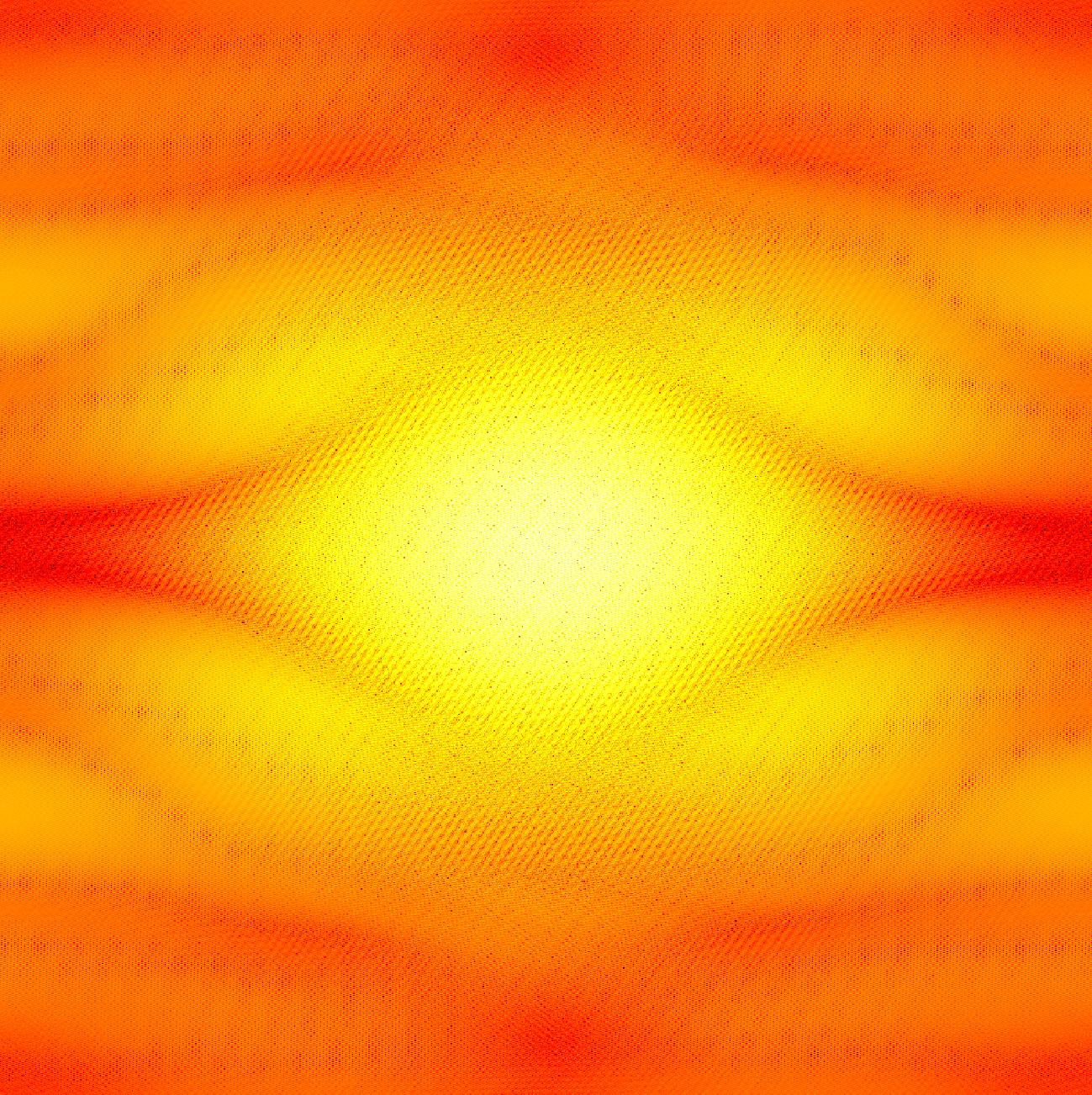
FFTGAN: Generative Adversarial Network system for generating cosmological images in the frequency space
In this project, we discuss techniques to quantify the quality of cosmological images in the frequency domain. The problem consists of two parts. First, we had to find a way to quantify the concept of a ”cosmological image”. Second, we had to use knowledge and results which we obtained to generate a ”cosmological image”. The images are large, which required careful choice of techniques for discrimination and generation. Our research shows that classification on images which have strong local characteristics, which don’t have a fixed global location can be accomplished better in the frequency domain.
Download report
Game dev: That failed bank robbery
That failed bank robbery is a competitive local multiplayer game for 2 or 4 players in which two teams of thieves try to rob the same bank at the same time. Drive unlikely vehicles, pick up all the cash, steal your opponent’s loot, use a vast arsenal of different power-ups and get out there before the police catch you! The game was created as part of the Game Programming Lab at ETH Zürich during spring 2018 and will be presented at the GAMESCOM 2018 in Cologne.
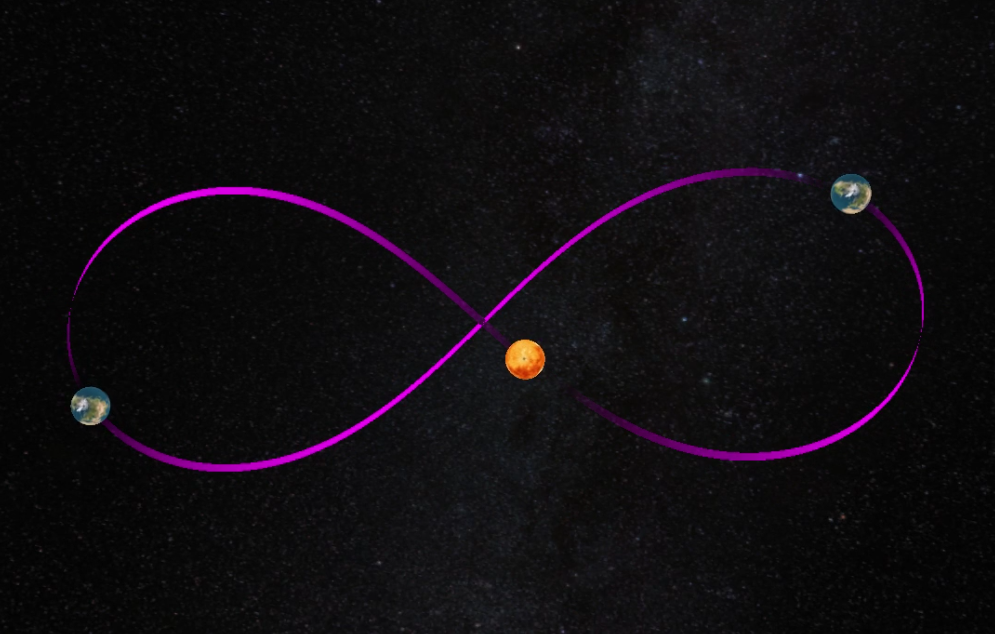
N-Body simulation with collision handling
Simulating planets and asteroids in space is an intersecting multi-dimensional challenge. Due to the nature of the setup, we have to solve a few hard challenges to achieve a real-time engine. The first part of the problem is the numerical computation of gravitational forces. This problem is today only solved analytically for 2 bodies. Since our objective is to have an asteroid field we using numerical methods to approximated these forces. Once the bodies start to move around the second challenge is to handle collisions and compute physically correct responses. Again this needs to be done in rather fast fashion to be able to run in real-time.
View Project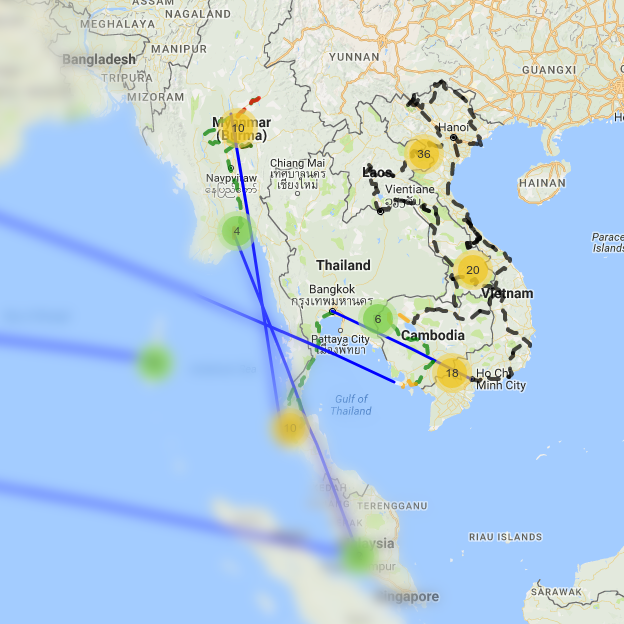
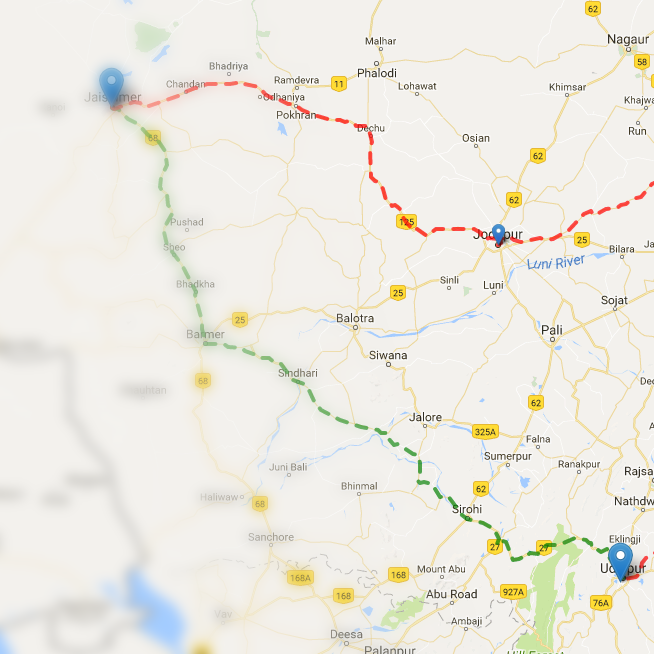
tripTrackr
The motivation behind this project was to understand the full stack developement of an app including a backend. Therefore I chose to create a travel app, where users can create a personal webpage with their travel trajectory and share it with friends.
View Project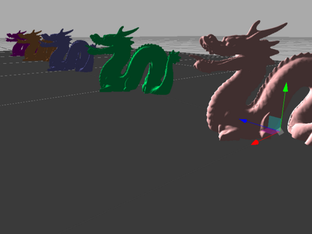
WebGL interface for the NORI renderer
Nori Webinterface is a web platform, functioning as a frontend for the Nori Raytracer. It features a user management system, allowing users to save and load scenes, which they can edit in a 3D editor in the browser. Scenes can then be rendered by the platform and will be streamed, piece by piece to the browser. The server uses Django to provide a REST API which is used by an Angular Web App. THREE.js is used for the 3D Editor. The rendered image is streamed to piece by piece via a Websocket.
View Project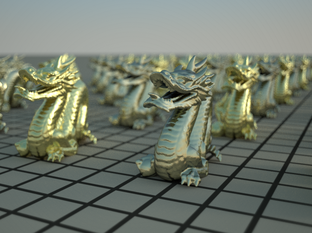
Generating BSDF layered material files
I decided to implement the paper A Comprehensive Framework for Rendering Layered Materials from Jakob Wenzel. The paper presents a new method for rendering material consisting of multiple layers by precomputing the reflection model. The technique supports arbitrary composition of materials and correctly accounts for multiple scattering within and between layers. In terms of a rendering system, the models are efficient to evaluate. By exploiting the concepts of sparse matrix representation, the precomputed values can be stored space efficiently, even for high glossy materials, and be reused for different scenes.
View Project
Physically based renderer
I want to render a complicated forest scene in the morning. The scene should contain a rarely used train track on which you can see a very old Swiss-made train approaching. The train will be a steam locomotive, which emits a lot of dark steam. Because the scene takes place in the morning it will be very foggy, so that you can see the sun rays passing through the forest canopy. To achieve that, I took the Nori renderer and implement the necessary features, like Volumetric Photon mapping with beam radiance estimate or an environment map emitter with importance sampling.
View Project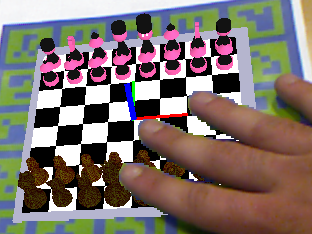
Thermal augmented reality chess
The goal of this project was to create an augmented reality chess game. To achieve thie we used two cameras - a RGB-D camera and a thermal camera. The RGB camera is used to track a paper checkerboard with augmented reality markers which are used to estimate the pose of the camera. The video with the resulting camera matrix are used by OpenGL to augment the video with the virtual game objects. We use a thermal camera for the detection of the user input.
Download Project report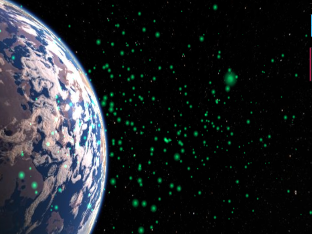
N-body simulation using particles
I wanted to learn the basics of three.js and implement a simple particle based n-body simulation. The whole simulation runs in the browser in real time and allows parameter changes on the fly.
View Project